
Gyro / Acceleration Sensor Board helps balancing KTX walking and acrobatic motions.
The kit comes with sensor board and cable, screws.
- Sensor board x1
- IX-Bus Cable x 1
- M2-4 Non-Tapping Screw x 4
Installation
Tools:
- Phillips-head screw driver P.1
- Phillips-head screw driver P.0 or P.00
* For M2 screws, I normally use P.00 screw drivers; however, the head size varies a little by the make, chose best fitting screw driver to prevent damaging the screw head.
- Loctite
* Apply a little to the screw thread when the screw is screwed into threaded metal parts.
Step1: Take off the body plates and ...
Using P.1 screw driver,Take off the front and back body plate off. There are 4 screws on both front and back. If you have remote receiver connected, take it off. Also, take off the battery, too.
Step2: Take off the sensor bracket and left arm.


Take off the sensor bracket. There are 2 screws on both front and back.
Step3: Connect cable to the sensor board

Connect IX-Bus cable to the sensor board. Make sure the orientation of the cable is correct. You should have brown cable connected to pin #1 as shown in above picture. Also, make sure the dip switch is set to all OFF. For more information, please look at setup document here.
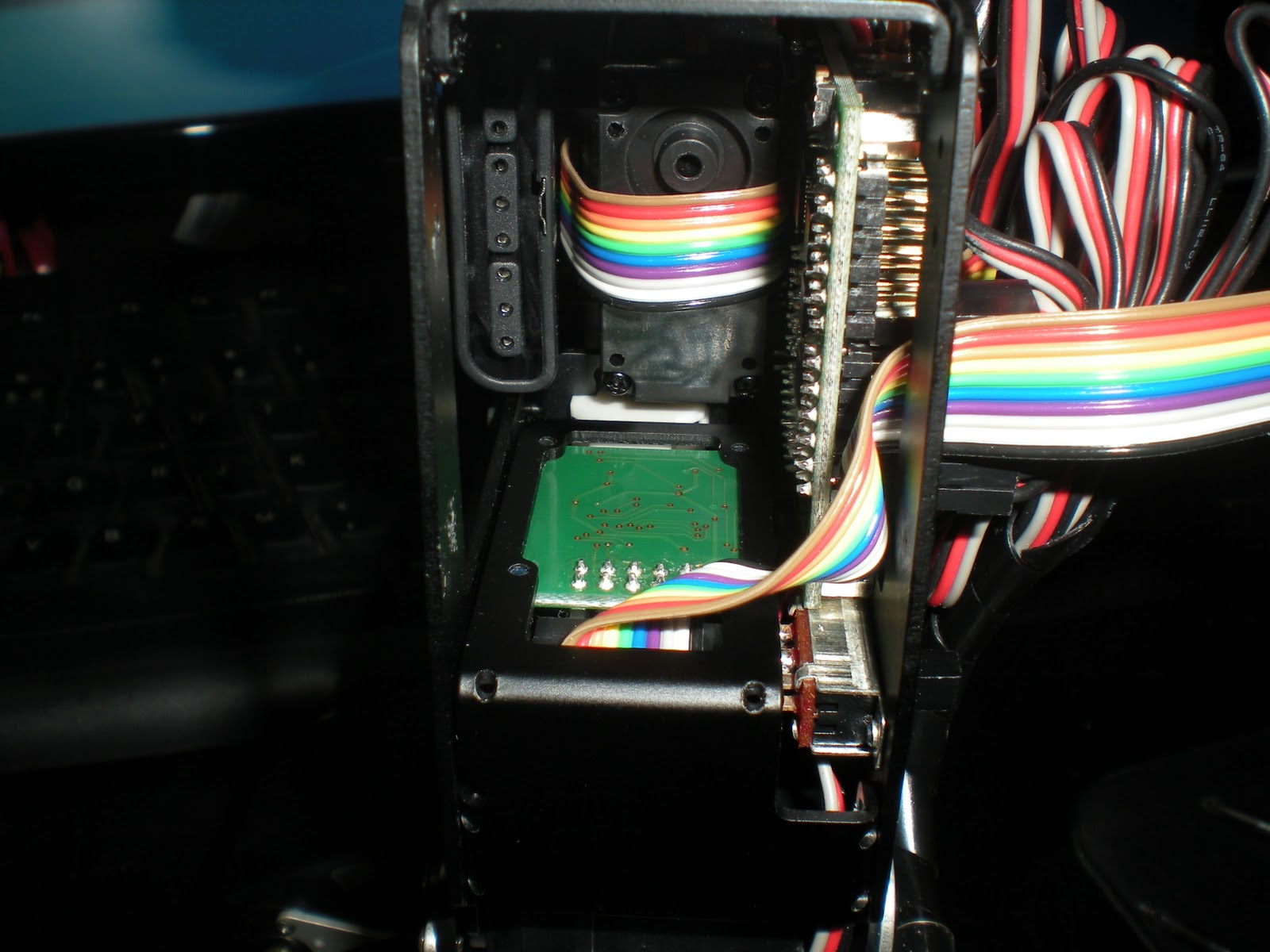
Step4: Place sensor board on the bracket

Run the cable through the hole of the bracket as shown in the picture.


Using P.00 (or P.0) screw driver, screw the sensor board on the bracket with 4 M2-4 non-tapping screws. Don't forget Loctite!!!
Step5: Place the sensor bracket back on the robot

Take off 4 M2-4 screws that holding the CPU board and slid the board to the right.
Run the IX-Bus cable through the space between the CPU board and the back side metal plate.
Mount the sensor board bracket. Screw 2 M2-4 on both front and back.
Step6: Place the left arm


Step7: Connect the servo cables of left arm


Step8: Connect IX-Bus cable to the CPU board
 Connect the IX-Bus cable to the CPU board.
Connect the IX-Bus cable to the CPU board.
Step9: Put everything back
Put everything back on the robot such as remote receiver, body plates, and battery.
* I normally leave the battery unplugged, so that it won't runs out the charge.
Step10: Setting up the board using RM2
Go to this link and open or download PDF file, and follow the instruction!!!

Step9: Put everything back
Put everything back on the robot such as remote receiver, body plates, and battery.
* I normally leave the battery unplugged, so that it won't runs out the charge.
Step10: Setting up the board using RM2
Go to this link and open or download PDF file, and follow the instruction!!!
Masahiro Hi, good article, what I have to do to get sdk program? regards
ReplyDeleteThe SDK comes with KTX-PC Robots.
ReplyDeleteYou can also purchase it from us for $100..., not exactly sure about the pricing.
Or you can provide us some contribution to our projects and get it for free.
hi thanks for replying, I have created bipedolandia.com forum, there is a subforum of Robovie, where I put everything done with my robot, translation of manuals, etc. .. Spanish language, you mean that kind of contribution? My name is guanajo forum, I'll let the forum link http://www.bipedolandia.es/f21-vstone-robovie-kumotex-x-kt-x ,
ReplyDeleteSuperca,
ReplyDeleteLet's talk more. Send me a little description about your work done and will be done to your robots. And explain me what you want to do with the SDK. masahiroATkumotek.com
hello masahiro, I have a Robovie X, I've done with the different jobs that are posted on the forum bipedolandia.com, in the section of Robovie, these are:
ReplyDelete1º Install a sensor ird in the Robovie , when it detects a ball, grabs her arms and then kicks with his foot, this is the video :
http://www.youtube.com/watch?v=TTLsOQE4GdE&feature=player_embedded
2º I translated manual to Spanish, the pogrom robomaker also have changed the menu to Spanish
3 º I installed 10 servos High Power vs-281 in the legs, but I'm half way because I need new parts for the robot, I have been in contact with Fabio kumotek for over two months , but I can not draw attention to it in the sale of parts to my. this is the video I have for now without the parts I need;:
http://www.youtube.com/watch?v=-e8E7FjLWI8&feature=player_embedded
4 ° I am currently in stallation of the Ix008a and then install a camera cmucam3
5 ° I have done many tutorials Robovie X, such as serial communication, cpu variables, giroscoppo, etc in spanish ...
All my work you can see your http://robotica.foroactivo.com/f21-vstone-robovie-kumotex-x-kt-x forum, my nick is guanajo
Also I contact whith fabio to see if I can officially distribute robot "Robovie" in Europe because I have plans to open a robotics shop soon.
With the SDK software I want to exploit everything I can about the Robovie, especially direct and wireless communication with the computer, but I do not even potential of software.
a greeting
the parts that interest me are:
ReplyDelete2 piezas http://www.vstone.co.jp/robotshop/index.php?main_page=product_info&cPath=70_73_83&products_id=586
4 piezas http://www.vstone.co.jp/robotshop/index.php?main_page=product_info&cPath=70_73_83&products_id=588
2 piezas http://www.vstone.co.jp/robotshop/index.php?main_page=product_info&cPath=70_73_83&products_id=589
2 piezas http://www.vstone.co.jp/robotshop/index.php?main_page=product_info&cPath=70_73_83&products_id=585
2 piezas http://www.vstone.co.jp/robotshop/index.php?main_page=product_info&cPath=70_73_83&products_id=591
1 http://www.vstone.co.jp/robotshop/index.php?main_page=product_info&cPath=70_73_81&products_id=464
1 http://www.vstone.co.jp/robotshop/index.php?main_page=product_info&cPath=70_73_81&products_id=184
Superca,I need your contact information. Please send me email. masahiroATkumotek.com
ReplyDeleteok, mi email is canarioalpoder@hotmail.com and bipedolandia@bipedolandia.com
ReplyDeleteMasahiro,
ReplyDeleteI just picked up a Robovie-X on clearance from seeedstudio.
Unfortunately it did not come with the VS-IX001 gyro.
Where an I get the gyro in the US?
Hi SpudGasket,
ReplyDeleteYou can buy from us.
Please give us a call!
http://www.kumotek.com/contact/index.htm
Masahiro
Great!!
DeleteI will Thank you!