It's really getting hard to find PS2 remote controllers new/used...
When you buy our KTX robots from us, make sure you get the remote also!
Here is the new version of KTX remote controller, VS-C3.

The remote controller for one of our demo KTX is getting old and having problem with the analog stick...
Let's replace with new VS-C3!

1. Remove 4 screws and take the front body panel off.

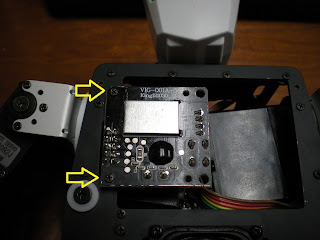
2. Remove 2 screws and take the old receiver out.


3. Connect new receiver.

4. Place the AAA batteries inside remote controller and turn on the remote controller.


5. Place battery inside the robot and turn on the robot, then press the button switch on the receiver.

6. The red and green LEDs should start blinking faster. Press the "analog" button once on the remote controller.
 7. If the remote controller is paired ok, The LEDs should stop blinking and stay turned on.
7. If the remote controller is paired ok, The LEDs should stop blinking and stay turned on.
8. Place the receiver and screw it on.
When you buy our KTX robots from us, make sure you get the remote also!
Here is the new version of KTX remote controller, VS-C3.

The remote controller for one of our demo KTX is getting old and having problem with the analog stick...
Let's replace with new VS-C3!

1. Remove 4 screws and take the front body panel off.

2. Remove 2 screws and take the old receiver out.





5. Place battery inside the robot and turn on the robot, then press the button switch on the receiver.

6. The red and green LEDs should start blinking faster. Press the "analog" button once on the remote controller.

8. Place the receiver and screw it on.


